 Telefon:
Telefon: E-post:
E-post:






Tänapäeval on tõstukid kui olulised abivahendid paigaldamiseks ja hooldamiseks kasutusel paljudes sotsiaalse ehituse aspektides. Nende hulgas on teleskooptõstukid muutumas selliste tööriistade peamiseks jõuks. Niisiis, kuidas valida tõstukite tootmisel teleskoop-roomikšassii? Võti peitub kahe põhiprobleemi lahendamises: üks on stabiilne teleskoop ja teine usaldusväärne liikumine. Tuginedes meie 20-aastasele kogemusele roomikšassiide projekteerimisel ja tootmisel, võtame konkreetsed projekteerimis- ja valikupunktid kokku järgmiselt:


1. Kuidas saavutada ohutu ja stabiilne paisumine ja kokkutõmbumine
Šassii teleskoopmehhanism on šassii laiuse muutmise keskmes. Tüübi valimisel tuleks pöörata erilist tähelepanu järgmisele:
· Hüdraulikasüsteem:
· Võimsus: Piisava võimsuse tagamiseks on soovitatav kasutada mõlemal küljel sõltumatuid kahekordseid hüdraulilisi seadmeid.
· Ohutus: Hüdraulilised ahelad peavad olema varustatud hüdrauliliste lukkudega, et vältida juhuslikku libisemist pärast pikenduse täielikku paigaldamist.
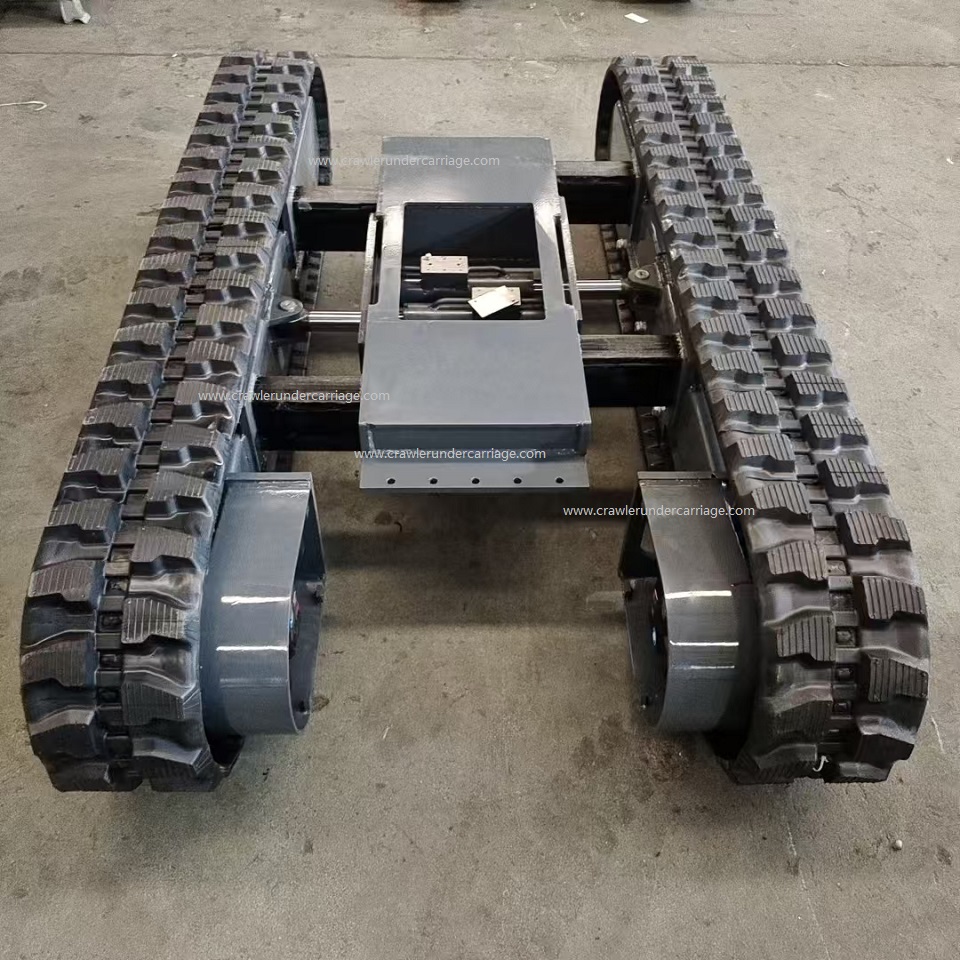
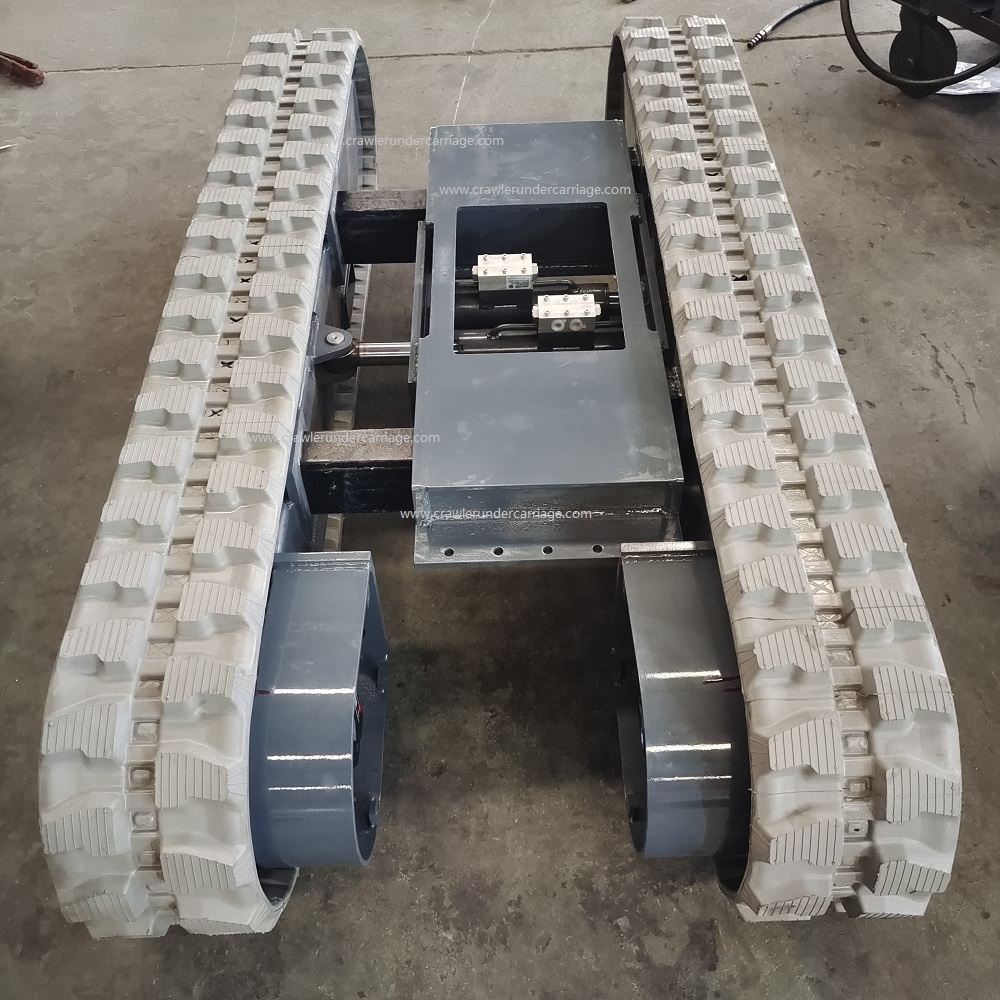
· Juhendstruktuur:
· Juhtrööpad: Šassii mõlemal küljel asuvate pea- ja risttalade vahele tuleks paigaldada topeltjuhtvardad, et tagada sujuv ja stabiilne pikendamine.
· Ristpaigutus: Mõlemal küljel olevad juhtvardad tuleks paigutada vaheldumisi, mis võimaldab piiratud ruumis saavutada suurema ulatuse.
· Spetsiaalne tehnoloogia: Mõned patenteeritud konstruktsioonid võimaldavad roomikute laiust maapinnalt tõusmata reguleerida, mis suurendab oluliselt kohapealsete toimingute mugavust.
2. Kuidas tagada liikumise usaldusväärsus keerulistes teeoludes
Konstruktsiooniline disain: tagada, et "materjalid jäävad stabiilseks ilma deformatsioonita"
Teleskoopmehhanism tekitab materjalistruktuuris nõrku kohti ja neid tuleb konstruktsiooni abil tugevdada:
· Kõrgtugevad materjalid ja topoloogia optimeerimine: Kandvad komponendid, näiteks raam ja rööpatala, peavad olema valmistatud kõrgtugevast terasest ning koondamise kõrvaldamiseks ja jäikuse suurendamiseks kasutatakse topoloogia optimeerimise tehnoloogiat (sarnaselt "X" või "H" tüüpi raami konstruktsiooniga).
· Võtmepiirkondade tugevdamine: Pingekontsentratsiooni piirkonnad, nagu jalgade tugialus ja teleskoopmehhanismi ühenduspunktid, vajavad terasmaterjalidega kõvadustöötlust või materjalide paksuse suurendamist, tagades konstruktsiooni ohutuse ja deformatsiooni puudumise raskete koormuste ja teleskoopiliste tingimuste korral.
3. Meisterlikkus ja töökindlus: tagage vastupidavus
Teleskoopkomponendid töötavad karmides tingimustes ja vajavad erilist tähelepanu:
· Kulumiskindel töötlus: Teleskoopjuhtvarda pind peab läbima kulumiskindla töötluse, näiteks karastamise; libisevatele kontaktpindadele saab tulevikus hoolduse hõlbustamiseks konstrueerida vahetatavaid kulumiskindlaid liugureid.
· Deformatsioonivastane protsess: Raami keevitamisel tuleks kasutada pöörddeformatsiooniga keevitusprotsessi, et kontrollida töötlemise deformatsiooni ja tagada teleskoopjuhtrööpa paigaldustäpsus.
4. Kõndimismehhanism: tagage "pidev liikumine"
Teleskoopkonstruktsioon ei tohi takistada kõndimist. Järgmised parameetrid tuleb arvutada ja kontrollida:
· Pinnasurve: valitud sihtväärtus on ≤ 50 kPa. See kaitseb kiirel teel sõites kasutatavat teekatet ja hoiab ära vajumise pehme teepeenra alla.
· Kallakute läbimise võime: Täiskoormusel peab see vastama ≥ 40% (umbes 22°) kallakule
· Kliirens: ≥ 300 mm. See hoiab ära šassii allavajumise ebatasasel teel sõites.
· Sõidukiirus: 0–2 km/h (töö ajal peenhäälestamiseks) / 0–4 km/h (lühikeste vahemaade läbimiseks)
5. Kliendi juhtum
Tõsteplatvormi töökeskkond: elektriseadmete paigaldamine ja hooldus Hiina kiirteedel ning puude langetamine ja kärpimine Norra metsades.
Lahendused: Võimalik ohutult sirutada ja liikuda ebatasasel pinnal
Kui teil on töökõrguse või kandevõime osas erinõuded, saan aidata teil hinnata vajaliku šassii ligikaudseid spetsifikatsioone.
Palun võtke meiega viivitamatult ühendust.
https://www.crawlerundercarriage.com
WhatsApp: +8613862448768
Email: manager@crawlerundercarriage.com